麻省理工学院的研究人员已经开发出一种方法,使计算机可以根据可用零件和局部地形来设计自己的机器人主体。该系统称为RoboGrammar,它知道它将需要克服的障碍以及可用的设备,并从那里进行其他工作。该论文的主要作者艾伦·赵(Allan Zhao)告诉《麻省理工新闻》,尽管机器人使用了各种各样的任务,但它们的设计往往“在形状或设计上都非常相似”。
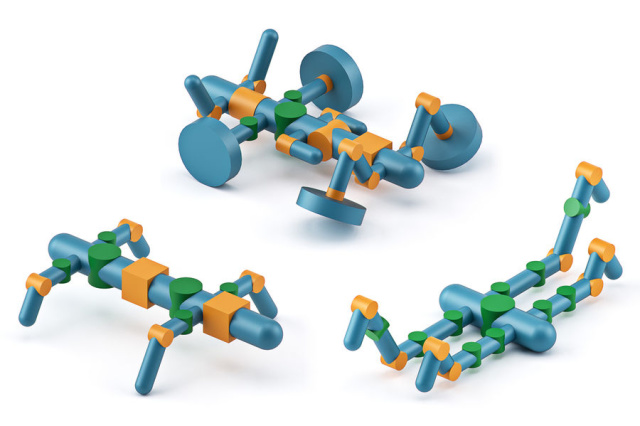
机器人通常被设计为模仿人,动物(四只脚)或车辆,并通过轮子和轨道移动。但这可能不是最有用或最有效的形式,这就是RoboGrammar唯一的限制是围绕构建机器人的实际限制的原因。例如,在一个模拟中,地形崎rough不平,有许多激流回旋,最好的设计看起来更像是一条鳄鱼,而不是其他任何东西。然后将机器人置于地形模拟中,以确保其以有意义的方式运行。
自然地,该系统尚未准备好使计算机能够在没有任何人工输入的情况下设计自己的机器人。但这是能够制造出比我们目前梦dream以求的设备更适合其环境且效率更高的设备的有趣的第一步。团队的下一步是实际构建一些系统已经成熟的机器人,以查看模拟的承诺是否与现实相符。赵补充说,该系统可以使需要快速,高效地构建人口稠密环境的程序开发视频游戏的工程师和设计师受益。